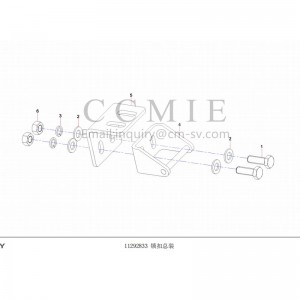
Rota oneratus virga connectens parce partes pro XCMG Liugong rota oneratus

Connectens virga
Quia multae species partium parcunt, eas omnes in situ ostendere non possumus. Placet sentire liberum contactus nos pro certis.
Commodum
1. supplemus utrumque originale et aftermarket products ad
2. A fabrica ad emptorem directe, tuo pretio salvis
3. Stabulum pro stirpe partium normalis
4. In Time Delivery Time, cum competitive shipping cost
5. Lorem ac tempus post servitium
stipare
Lobortis adipiscing: vel iuxta clientium petitionem.
descriptio
Munus connexionis est piston et crankshaft iungendi, ita ut reciprocus motus linearis piston fit gyratorius motus crank ad output potestatem.
Connexum autem corpus ex tribus partibus constat, pars cum piston clavo coniuncta appellatur baculus minutus finis; pars crankshaft connexa dicitur baculus magnus finis iunctio, et virga connectens finem parvum et magnus finis vocatur virga connexionis scapus. Caput parvum virga connexionis est maxime tenuis structurae circularis anuli murata. Ut togam inter piston clavum et piston clavum reducat, tenuis fruticis aeneus muratus in foramen parvum comprimitur. Drill aut molae striatae in capite parvo et frutice ut spargatur oleum intra superficiem lubricantis fruticis et piston clavum admittit. Scapus virga connectens longa virga est, et vis magna in opere est. Scapus ad impediendam flexionem et deformationem satis rigiditatem habere debet.
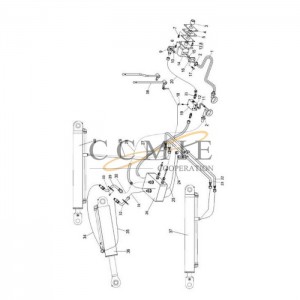
Secundum utrum motus relativus inter partes sit motus planus vel motus spatii, nexus mechanismus dividi potest in mechanismum et nexum localem mechanismum planum. Mechanismus planus nexus communis est mechanismus transmissio. Significat quod membra rigida sunt omnia connexa cum humilibus paribus, sic etiam dicitur par mechanismus humilis. Mechanismus plane nexus in variis machinis, instrumentis et machinis moderandis late adhibetur. Quales sunt machinae reciprocae, soleatus et compressores aeris, necnon planitores, machinis slotting, excavatores, oneratores, maxillae comminutores, vectores inductores, machinae typis, machinis textilibus, etc., machinae principales sunt machinae planae nexus. In nexu mechanismo, si partes non movent in eodem plano vel inter se parallelo, mechanismus vocatur mechanismus localis. [3] Secundum numerum partium in mechanismo in quattuor mechanismum bar, quinque mechanismum bar, mechanismum sex barum, etc. Fere quinque-barbara et plus quam quinque-barbara machinae mechanismi vocantur multi. —bar machinationes. Cum libertatis nexus mechanismus 1, vocatur unus gradus libertatis mechanismum; Cum maior libertatis gradus est quam 1, multiplex gradus libertatis vocatur mechanismus.
Secundum an catena kinematica quae mechanismum nexum formans est catena aperta vel catena clausa, mechanismus correspondens nexus etiam in catenam apertam mechanismum iunctio dividi potest (manipulator plerumque catenam localem mechanismum nexum apertum in quo par kinematicum est par rotating vel par mo- ) biliter clausus et catena mechanismus. Numerus partium unius clausus-panni mechanismi mechanismi plani saltem 4, ideo simplicissima mechanismus planaris clausus catenae nexus mechanismus est quattuor vectis mechanismus, et aliae multi-coniunctiones mechanismi clausae catenae nihil aliud sunt quam expansio. baculus globus innititur; Numerus clausus-loop Numerus componentium mechanismi nexus localis saltem 3, sic tria membra spatialem mechanismum tres formare possunt.
Coniunctiones mechanismi varias formas motus habent, ut rotationis, adductae, motus et complexi motus in plano vel spatio, quae ad leges motus notae et notae trajectorias cognoscendas adhiberi possunt.
commoda
(1) Minimum par: superficies contactus, magnum pondus portans, facilis ad praelinm, non facilis ad induendum, figura simplex, processus facilis, facile ad altam fabricam accurate.
(II) Mutato relativo virgae, motus lex sequentis alia est.
(3) Contactus inter duo membra sua clausura geometrica conservatur, dissimiles machinationes cam, quae interdum uti necesse est fontium et alia vi clausuram ad contactum ponere.
(4) Copula virga curvae dives est, quae diversis requisitis occurrere potest.
Incommoda
(1) Multae partes motusque sunt paria, magna cumulatio erroris, motus humilitatis accuratio, humilis efficientia.
(2) Onus Dynamicum (vis inertiae) generatur, et non facile est ad stateram, et ad altum celeritatem non convenit.
(3) Consilium complexum est et difficile est accuratam trajectoriam consequi.
Ergo mechanismus plane nexus in variis machinationibus, instrumentis et electromechanicis productis late adhibetur. Cum evolutione instrumentorum instrumentorum mechanismi nexus, popularis applicationis computatrorum electronicarum et progressionis programmatis affinis, consilium celeritatis et designationis subtiliter de mechanismo nexus valde meliores sunt, et cum requisitis kinematicis occurrens, etiam considerari potest. dynamica virtus. Praesertim introductio technologiae microelectronicarum ac technologiae automatis moderandae, et adoptio multimodi-graduum libertatis mechanismi valde simpliciorem structuram et consilium nexus mechanismi et applicationes latius patet.
Noster-warehouse1

Pack et navis

- Aeria Boom leva
- Sina Hunter CARRUS
- Frigus Recycler
- Conus Crusher Liner
- Continens Latus Lifter
- Dadi Bulldozer Part
- Forklift analecta adscriptione
- Hbxg Bulldozer Partes
- Howo Engine Parts
- Hyundai Excavator Hydraulic Pump
- Komatsu Bulldozer Partes
- Komatsu Excavator Apparatus Shaft
- Komatsu Pc300-7 Excavator Hydraulic Pump
- Liugong Bulldozer Partibus
- Sany Concrete Pump parce Partibus
- Sany Excavator Parce Partibus
- Shacman Engine Partes
- Shantui Bulldozer Clutch Shaft
- Shantui Bulldozer Connectens Shaft Pin
- Shantui Bulldozer Control flexibile Shaft
- Shantui Bulldozer flexibile Shaft
- Shantui Bulldozer elevatum cylindrum Restituo Kit
- Shantui Bulldozer Partibus
- Shantui Bulldozer Reel Shaft
- Shantui Bulldozer inversa Apparatus Shaft
- Shantui Bulldozer parce Partibus
- Shantui Bulldozer Winch Coegi Shaft
- Shantui Dozer Bolt
- Shantui Dozer Ante Idler
- Shantui Dozer hastiludio Cylinder Repair Kit
- Shantui Sd16 Bevel Apparatus
- Shantui Sd16 fregit Lining
- Shantui Sd16 Porta Conventus
- Shantui Sd16 Ring
- Shantui Sd16 Track Rollerus
- Shantui Sd22 ferens Sleeve
- Shantui Sd22 Friction Disc
- Shantui Sd32 Track Rollerus
- Sinotruk Engine Partes
- Truck stuppa
- Xcmg Bulldozer Partibus
- Xcmg Bulldozer Parce Partibus
- Xcmg Hydraulica Lock
- Xcmg Transmissio
- Yuchai Engine Partibus